Proyecto UDEA · Ingeniería de Sistemas
1er Lugar
Robot Sigue-Líneas: Ingeniería de Competición
Desarrollado para el concurso de robótica de la Universidad de los Ángeles (UDEA), este prototipo autónomo representa la convergencia de la electrónica de potencia y el control de sistemas. Mediante un algoritmo PID de lazo cerrado, el robot procesa variables de su entorno en tiempo real para optimizar su trayectoria y velocidad.
🥇 1er Lugar
Competencia UDEA
⏱ 13.0s
Récord de Pista
⚙ PID
Control Algorítmico
8
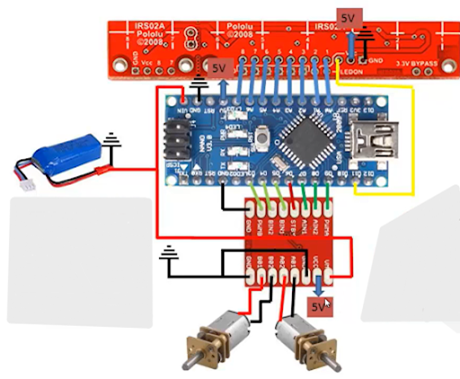
Sensores QTR para lectura fina de trayectoria.
PID
Control proporcional, integral y derivativo calibrable.
2
Motores con tracción diferencial para maniobra estable.